Review exercise 2.25. Suppose that  is a linear transformation from
is a linear transformation from  to itself, and transforms the point
to itself, and transforms the point  to the point
to the point  . What does the inverse transformation
. What does the inverse transformation  do to the point
do to the point  ?
?
Answer: The effect of is to reverse the effect of . Since takes the first entry of a vector and makes it the last entry of the resulting vector, must take the last entry of a vector and make it the first. So applying to the point results in a point whose first entry is  .
.
Next, takes the second entry of a vector, adds to it the first entry, and makes the sum the second entry of the resulting vector. In reversing this must take the second entry and subtract from it the original first entry. So applying to the point results in a point whose second entry is  (since was the original first entry, as discussed in the previous paragraph).
(since was the original first entry, as discussed in the previous paragraph).
Finally, takes the third entry of a vector, adds to it the first and second entries, and makes the sum the first entry of the resulting vector . In reversing this must take the first entry and subtract from it the original first entry and second entry. So applying to the point results in a point whose third entry is  . (Recall that was the original first entry, and the original second entry.)
. (Recall that was the original first entry, and the original second entry.)
The inverse transformation thus transforms the point into the point  . To confirm this, we apply the transformation to resulting in the point
. To confirm this, we apply the transformation to resulting in the point

The transformation is thus indeed the inverse of the transformation .
Note that another way to compute is to take the matrix ![[T]](https://s0.wp.com/latex.php?latex=%5BT%5D&bg=ffffff&fg=333333&s=0&c=20201002) corresponding to the transformation and compute its inverse
corresponding to the transformation and compute its inverse ![[T]^{-1}](https://s0.wp.com/latex.php?latex=%5BT%5D%5E%7B-1%7D&bg=ffffff&fg=333333&s=0&c=20201002) .
.
The linear transformation corresponds to the matrix
![[T] = \begin{bmatrix} 1&1&1 \\ 1&1&0 \\ 1&0&0 \end{bmatrix}](https://s0.wp.com/latex.php?latex=%5BT%5D+%3D+%5Cbegin%7Bbmatrix%7D+1%261%261+%5C%5C+1%261%260+%5C%5C+1%260%260+%5Cend%7Bbmatrix%7D&bg=ffffff&fg=333333&s=0&c=20201002)
so that applying to gives

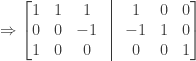
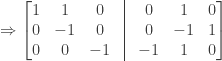
We can compute the inverse of using Gauss-Jordan elimination. Start with

Subtract 1 times the first row from the second row:
Subtract 1 times the first row from the third row:
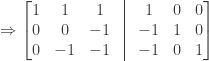
Exchange the second and third rows:
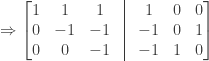
Subtract 1 times the third row from the second row:

Subtract -1 times the third row from the first row:
Subtract -1 times the second row from the first row:

Multiply both the second row and the third row by -1:

We thus have
![[T]^{-1} = \begin{bmatrix} 0&0&1 \\ 0&1&-1 \\ 1&-1&0 \end{bmatrix}](https://s0.wp.com/latex.php?latex=%5BT%5D%5E%7B-1%7D+%3D+%5Cbegin%7Bbmatrix%7D+0%260%261+%5C%5C+0%261%26-1+%5C%5C+1%26-1%260+%5Cend%7Bbmatrix%7D&bg=ffffff&fg=333333&s=0&c=20201002)
so that

and
![[T][T]^{-1} = \begin{bmatrix} 1&1&1 \\ 1&1&0 \\ 1&0&0 \end{bmatrix} \begin{bmatrix} 0&0&1 \\ 0&1&-1 \\ 1&-1&0 \end{bmatrix}](https://s0.wp.com/latex.php?latex=%5BT%5D%5BT%5D%5E%7B-1%7D+%3D+%5Cbegin%7Bbmatrix%7D+1%261%261+%5C%5C+1%261%260+%5C%5C+1%260%260+%5Cend%7Bbmatrix%7D+%5Cbegin%7Bbmatrix%7D+0%260%261+%5C%5C+0%261%26-1+%5C%5C+1%26-1%260+%5Cend%7Bbmatrix%7D&bg=ffffff&fg=333333&s=0&c=20201002)

So the linear transformation as defined by is indeed the inverse of the original transformation .
NOTE: This continues a series of posts containing worked out exercises from the (out of print) book Linear Algebra and Its Applications, Third Edition by Gilbert Strang.
by Gilbert Strang.
If you find these posts useful I encourage you to also check out the more current Linear Algebra and Its Applications, Fourth Edition , Dr Strang’s introductory textbook Introduction to Linear Algebra, Fourth Edition
, Dr Strang’s introductory textbook Introduction to Linear Algebra, Fourth Edition and the accompanying free online course, and Dr Strang’s other books
and the accompanying free online course, and Dr Strang’s other books .
.
 Buy me a snack to sponsor more posts like this!
Buy me a snack to sponsor more posts like this!